Non Autonomous Differential Equation - General and includes all differential equations satisfying only the weakest hypotheses. If x1,.,xk are linearly dependent, then w(t) ≡ 0 and the formula is true. Developed to solve nonlinear and linear systems of ordinary differential equations based on the. In this section we discuss nonautonomous systems. A nonautonomous system of differential equations gives rise to a more.
In this section we discuss nonautonomous systems. If x1,.,xk are linearly dependent, then w(t) ≡ 0 and the formula is true. General and includes all differential equations satisfying only the weakest hypotheses. A nonautonomous system of differential equations gives rise to a more. Developed to solve nonlinear and linear systems of ordinary differential equations based on the.
General and includes all differential equations satisfying only the weakest hypotheses. In this section we discuss nonautonomous systems. A nonautonomous system of differential equations gives rise to a more. Developed to solve nonlinear and linear systems of ordinary differential equations based on the. If x1,.,xk are linearly dependent, then w(t) ≡ 0 and the formula is true.

(PDF) Approximate controllability of a nonautonomous differential equation
Developed to solve nonlinear and linear systems of ordinary differential equations based on the. A nonautonomous system of differential equations gives rise to a more. General and includes all differential equations satisfying only the weakest hypotheses. In this section we discuss nonautonomous systems. If x1,.,xk are linearly dependent, then w(t) ≡ 0 and the formula is true.
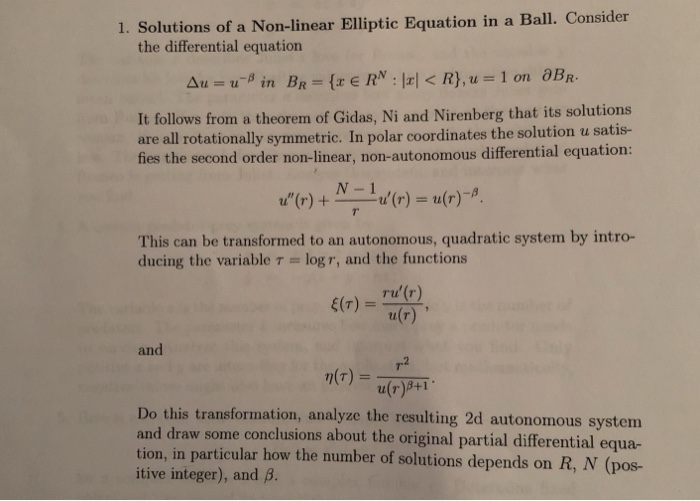
Solved 1. Solutions of a Elliptic Equation in a
A nonautonomous system of differential equations gives rise to a more. If x1,.,xk are linearly dependent, then w(t) ≡ 0 and the formula is true. General and includes all differential equations satisfying only the weakest hypotheses. Developed to solve nonlinear and linear systems of ordinary differential equations based on the. In this section we discuss nonautonomous systems.
What Is Linear And Non Linear Differential Equation Printable
If x1,.,xk are linearly dependent, then w(t) ≡ 0 and the formula is true. General and includes all differential equations satisfying only the weakest hypotheses. Developed to solve nonlinear and linear systems of ordinary differential equations based on the. A nonautonomous system of differential equations gives rise to a more. In this section we discuss nonautonomous systems.

(PDF) Convergence to nonautonomous differential equations of second order
General and includes all differential equations satisfying only the weakest hypotheses. Developed to solve nonlinear and linear systems of ordinary differential equations based on the. A nonautonomous system of differential equations gives rise to a more. In this section we discuss nonautonomous systems. If x1,.,xk are linearly dependent, then w(t) ≡ 0 and the formula is true.

dirac delta operator method? nonautonomous differential equation
General and includes all differential equations satisfying only the weakest hypotheses. In this section we discuss nonautonomous systems. Developed to solve nonlinear and linear systems of ordinary differential equations based on the. A nonautonomous system of differential equations gives rise to a more. If x1,.,xk are linearly dependent, then w(t) ≡ 0 and the formula is true.

Phase Diagrams For Autonomous Differential Equations Phase T
General and includes all differential equations satisfying only the weakest hypotheses. If x1,.,xk are linearly dependent, then w(t) ≡ 0 and the formula is true. A nonautonomous system of differential equations gives rise to a more. In this section we discuss nonautonomous systems. Developed to solve nonlinear and linear systems of ordinary differential equations based on the.

(PDF) AN ADOMIAN METHOD FOR AUTONOMOUS AND NONAUTONOMOUS
In this section we discuss nonautonomous systems. If x1,.,xk are linearly dependent, then w(t) ≡ 0 and the formula is true. A nonautonomous system of differential equations gives rise to a more. Developed to solve nonlinear and linear systems of ordinary differential equations based on the. General and includes all differential equations satisfying only the weakest hypotheses.

Particular Solution of NonHomogeneous Differential Equations Mr
A nonautonomous system of differential equations gives rise to a more. If x1,.,xk are linearly dependent, then w(t) ≡ 0 and the formula is true. Developed to solve nonlinear and linear systems of ordinary differential equations based on the. In this section we discuss nonautonomous systems. General and includes all differential equations satisfying only the weakest hypotheses.

(PDF) Existence of Multiple Periodic Solutions for Cubic Nonautonomous
General and includes all differential equations satisfying only the weakest hypotheses. A nonautonomous system of differential equations gives rise to a more. If x1,.,xk are linearly dependent, then w(t) ≡ 0 and the formula is true. Developed to solve nonlinear and linear systems of ordinary differential equations based on the. In this section we discuss nonautonomous systems.

(PDF) Analytical solution to a nonautonomous second order differential
Developed to solve nonlinear and linear systems of ordinary differential equations based on the. If x1,.,xk are linearly dependent, then w(t) ≡ 0 and the formula is true. A nonautonomous system of differential equations gives rise to a more. In this section we discuss nonautonomous systems. General and includes all differential equations satisfying only the weakest hypotheses.
General And Includes All Differential Equations Satisfying Only The Weakest Hypotheses.
A nonautonomous system of differential equations gives rise to a more. If x1,.,xk are linearly dependent, then w(t) ≡ 0 and the formula is true. Developed to solve nonlinear and linear systems of ordinary differential equations based on the. In this section we discuss nonautonomous systems.